Ubiquitous math
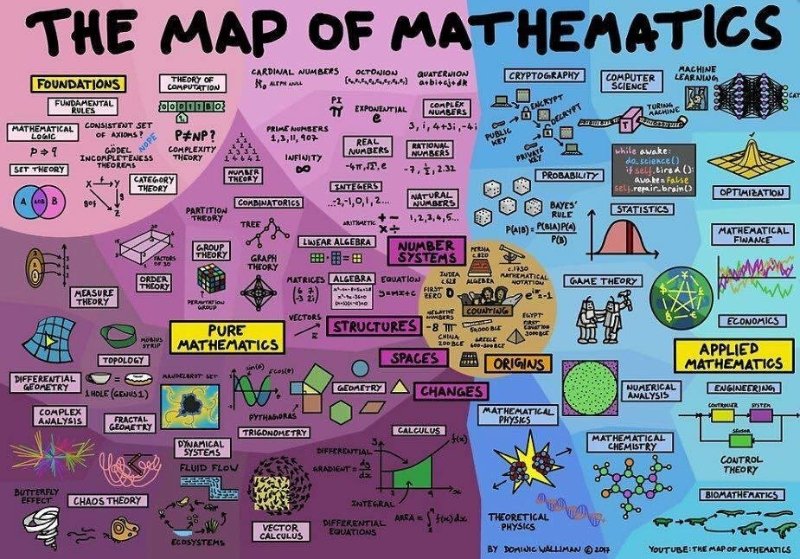 (Map by Dominic Walliman)
(Map by Dominic Walliman)
 (source)
(source)

 (source)
(source)
 (source)
(source)
{kind=link}
{kind=link}
{kind=link}